ノンシーケンシャルモードで公差解析を行う方法について説明します。
Solved
ノンシーケンシャルモードで公差解析を行う方法
 +1
+1Best answer by Kensuke.Hiraka
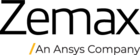
以下のサンプルファイルを使用して説明します。
\Zemax\Samples\Non-sequential\Miscellaneous\Even Asphere.zmx
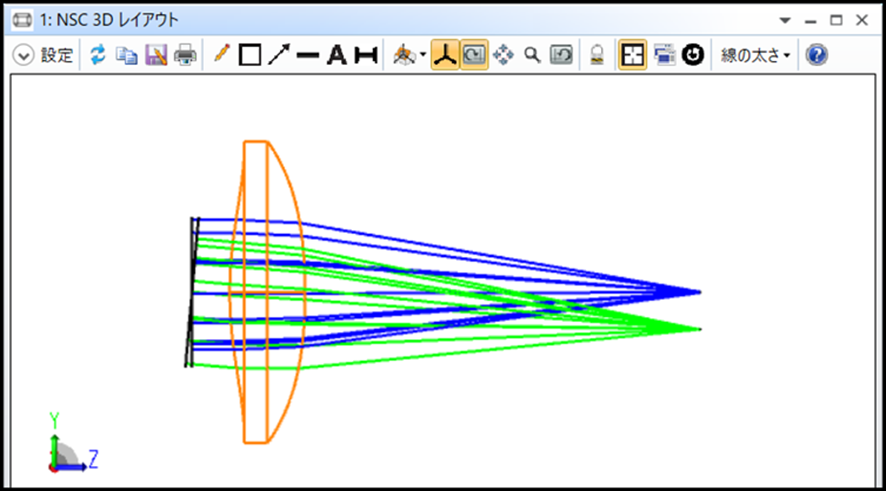
こちらのサンプルで軸外のディテクタで検出されるスポットサイズが、どの程度変化するか解析します。解析光線本数が100万本だと、時間がかかるので10万本などにすることをお勧めします。ノンシーケンシャルモードの公差解析では、基準に評価関数を使用しますので、メリットファンクションを設定します。最適化ウィザードで、解析対象をディテクタ5、基準をスポットサイズ、ターゲットを0とします。
OKを押すとオペランドが作成され、メリットファンクションを更新すると現在のスポットサイズを確認できます。

次に公差解析エディタを設定します。今回は、前面の曲率半径とレンズのY位置を公差として与えます。また、コンペンセータとしてディテクタのz軸の位置を設定します。
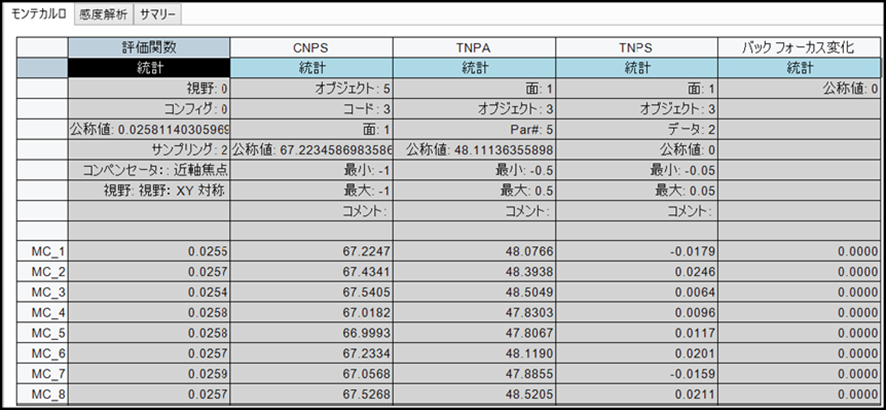
1行目(CNPS)が、ディテクタ位置のコンペンセータになります。
2行目(TNPA)が、レンズ前面の曲率半径パラメータに与えた公差になります。
3行目(TNPS)が、レンズのY位置に与えた公差になります。

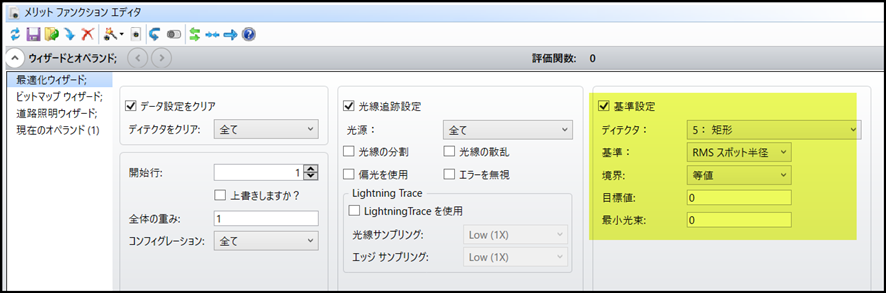
注意点として、基準に評価関数が用いられる場合、コンペンセータに対する制約(Min, Max)が無視されます。そのため、上記で設定しているコンペンセータの制限は、無視されることになります。
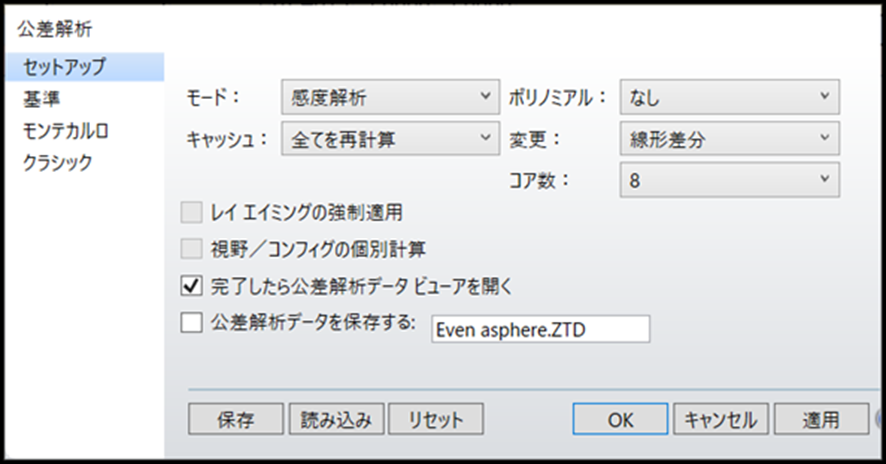
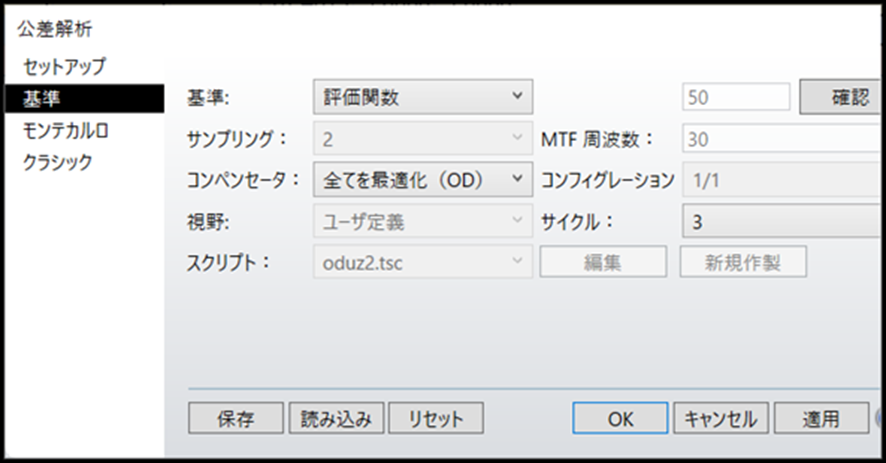
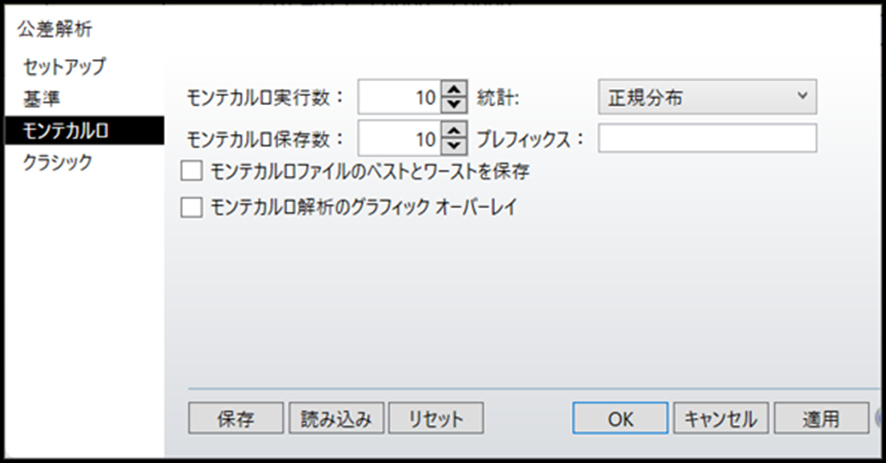
公差解析を実行します。
公差解析の設定は、今回は以下のようにしました。
公差解析が終了すると、以下の解析結果が得られます。
Enter your E-mail address. We'll send you an e-mail with instructions to reset your password.
Need more help?
To Chinese users:
Do not provide any information or data that is restricted by applicable law, including by the People’s Republic of China’s Cybersecurity and Data Security Laws ( e.g., Important Data, National Core Data, etc.).
不要提供任何受适用法律,包括中华人民共和国的网络安全和数据安全法限制的信息或数据(如重要数据、国家核心数据等)。