https://support.zemax.com/hc/en-us/articles/1500005576822-Rotation-Matrix-and-Tilt-About-X-Y-Z-in-OpticStudio is misleading.
OpticStudio uses degrees for Tilt About X/Y/Z, and this graphic suggests using theta_x = tilt about x. Tilt about X is in degrees, but theta_x should be in radians. If you do as the graphic suggests and plug in degrees, you'll get the wrong rotation matrix.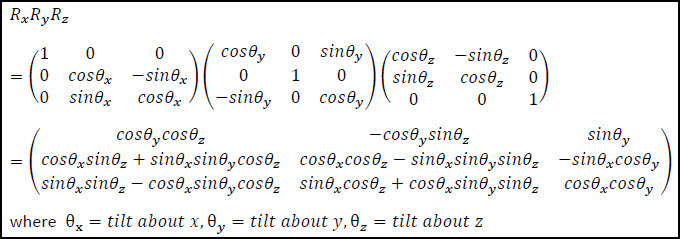
Please let me know if I'm wrong here.
Question
Problem with rotation matrix article






Reply
Enter your E-mail address. We'll send you an e-mail with instructions to reset your password.
Need more help?
To Chinese users:
Do not provide any information or data that is restricted by applicable law, including by the People’s Republic of China’s Cybersecurity and Data Security Laws ( e.g., Important Data, National Core Data, etc.).
不要提供任何受适用法律,包括中华人民共和国的网络安全和数据安全法限制的信息或数据(如重要数据、国家核心数据等)。