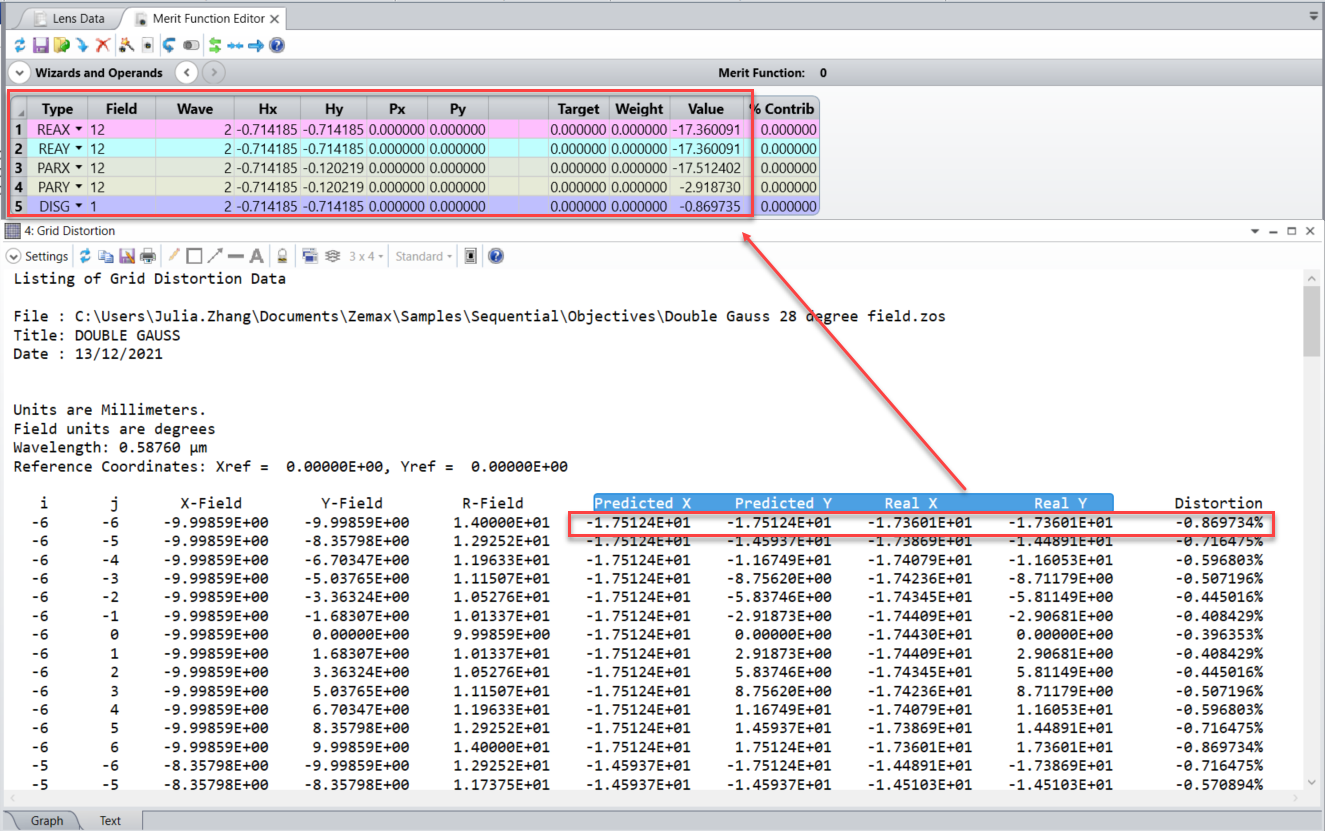

在相机校正中使用算法对图片进行畸变校正时,需要使用如以下链接中所描述的畸变参数,如何从OpticStudio中来获取这些参数?
https://docs.opencv.org/4.x/d4/d94/tutorial_camera_calibration.html
https://www.mathworks.com/help/vision/ug/camera-calibration.html
x_distorted = x(1 + k1*r2 + k2*r4 + k3*r6)
y_distorted= y(1 + k1*r2 + k2*r4 + k3*r6)